In the previous installment of our series on collision detection, we shared learnings and trends based on data collected from all collisions observed in Nauto-equipped vehicles during 2018, and uncovered that collisions can occur at all g-force levels. However, non-collision events can also lead to significant levels of g-force, which can result in false-positives in fleet solutions that use g-force as the only collision indicator. As a result, we set out to develop an edge-to-cloud machine learning model, a subset of artificial intelligence (AI), that uses the sensor data surrounding an event to help detect true collisions with a high level of confidence — all in real-time.
Uncovering Sensor Patterns for Common Incidents
Nauto’s collision detection starts with a g-force value as the initial indicator that a collision may have occurred. From there, our on-device AI collision detection model analyzes the sensor data from before, during, and after the event to produce a confidence level for the likelihood of a true collision, all in real-time on the Nauto Device.
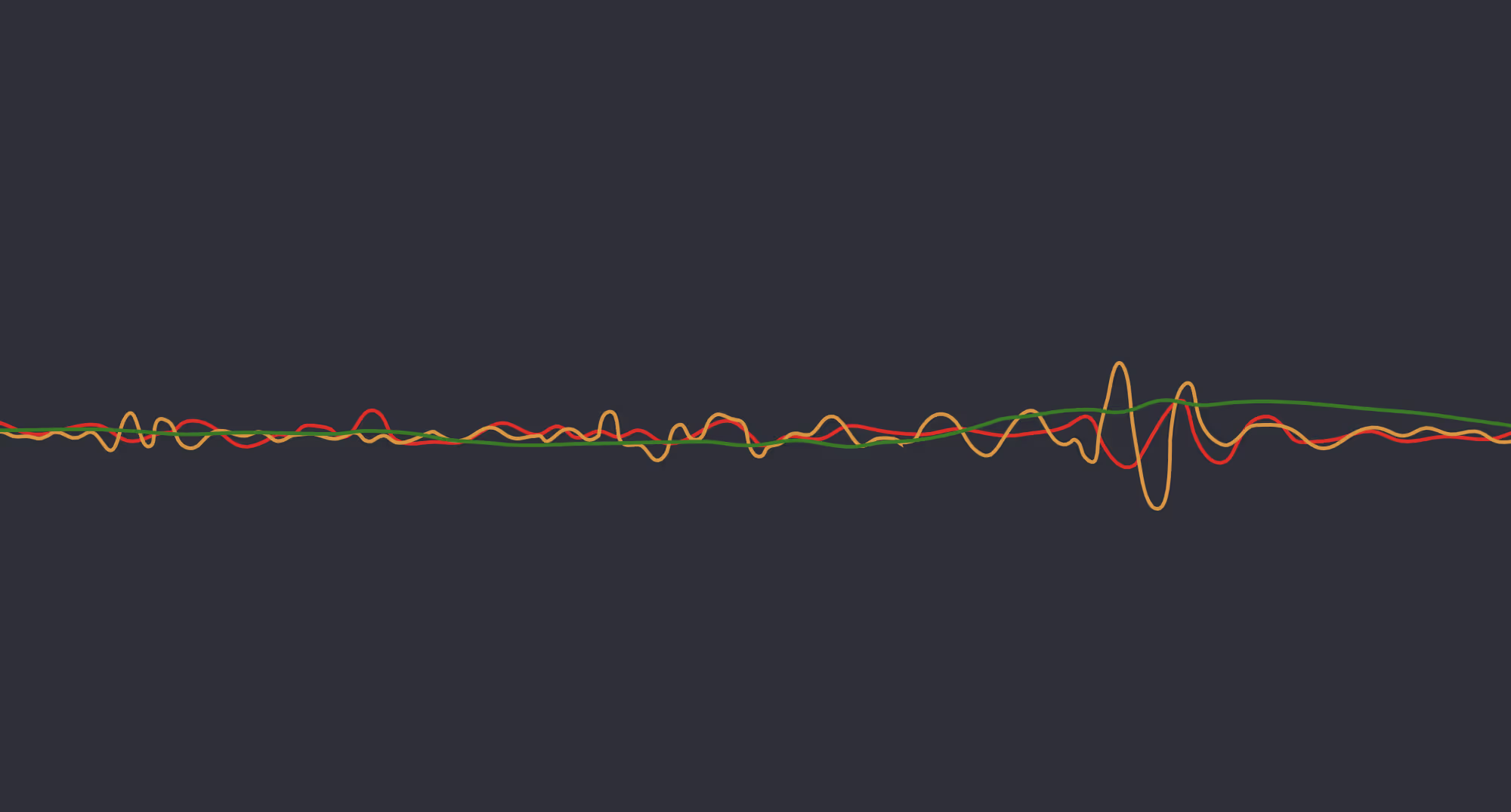
To demonstrate how the model works, check out two real-world events and their sensor signatures. Both events registered a g-force of around 2 g, but only one was a true collision event.
Event 1: True collision (1.6 g)
Event 2: High g-force event (2.46 g)
Observing the sensor signature visuals for each event, the human eye is unable to tell the difference between the true and false collision events. That’s where a deep learning neural network, or a set of algorithms designed to automatically recognize patterns, comes into play. Leveraging a growing database of driving miles, our collision detection model is continuously trained to recognize the sensor data patterns of a true collision. With the power of AI, we’re able to produce reliable results with a higher level of precision the moment a collision occurs to help fleet managers quickly address potential incidents.
Training the Collision Detection Model
At Nauto, our goal is to automate event detection capabilities to enable fleet safety at scale. The Nauto Device already supports a suite of on-device and edge-to-cloud AI models to power real-time detection of high-risk events, including collisions, distracted driving, and tailgating. To develop these models and reach automation, we need to first train them with real-world data and human-provided classifications to learn and continuously improve.
While the Nauto Device already runs collision detection models on the edge to power real-time collision detection, we continue to upload sensor data surrounding all possible collisions (based on the initial g-force indicator) into Nauto’s proprietary event analysis tool. From there, reviewers confirm if a collision occurred, which acts as a feedback loop for the model. The reviewers also label the event based on the visual context to continue to train the AI collision detection models to identify even more granular events.
As we grow our model training database with more driving miles, our collision detection models’ learning and performance continuously improve, resulting in more automatically detected true collisions to help Nauto-equipped fleets quickly address collisions and support their drivers.
We are already using the collision detection models to power customer features today, such as suspected and confirmed collision notifications and automated Collision Reports. Stay tuned to learn more about the collision and claims management features available now, or contact us today to schedule a demo!
--
Miss the other installments of this series? Read on to learn more about Nauto's AI-enabled Collision & Claims Management capabilities:

Related posts



Is Nauto right for your fleet?
Get in touch, we’ll answer questions or set up a demo.
